Aquanaut – «гибрид» из двух типов подводных роботов - «Роботы»

✔ Термин «Роботы» был введен в оборот Карелом Чапеком в своей пьесе «Россумские Универсальные Роботы», опубликованной в далеком 1920-м году. С тех пор о человекоподобных машинах написали все или почти все мировые фантасты, а три закона робототехники, предложенные писателем Айзеком Азимовым, считаются непреложной истиной, как будто бы разумные машины уже существуют. До искусственного интеллекта роботам еще далеко, но это не мешает им вовсю изобретаться и активно использоваться. |
Существует два основных типа подводных роботов – гладкие сигарообразные автономные подводные аппараты Autonomous Underwater Vehicles (AUV) и более громоздкие, дистанционно управляемые Remotely Operated Vehicles (ROV). Компания Houston Mechatronics разработала робота Aquanaut – своеобразный «гибрид» из двух вышеназванных типов подводных роботизированных беспилотников.
Aquanaut (его вес 1050 кг) работает в двух режимах – «экскурсионном» и рабочем. В первом случае корпус робота закрыт и обтекаем. В воду его спускают с берега или с судна. В движение он приводится с помощью двух подруливающих устройств, после чего Aquanaut начинает автономное плавание со максимальной скоростью 7 узлов (13 км/ч). Одной зарядки 30 кВт аккумулятора ему хватает на 200 км.

Попутно он может выполнять функции акустического, оптического и геохимического дистанционного зондирования с помощью «блока чувствительной головки», оснащенного различными датчиками — камерами или гидролокаторами.
Переход с «экскурсионного» на рабочий режим осуществляется по достижении определенного места. При этом его корпус трансформируется и выдвигаются еще два дополнительных векторных подруливающих устройства, два электрических манипулятора и отсек полезной нагрузки. «Голова» робота также приобретает еще одну степень свободы, чтобы позволяет выбирать наиболее удачную позицию для выполнения задачи.
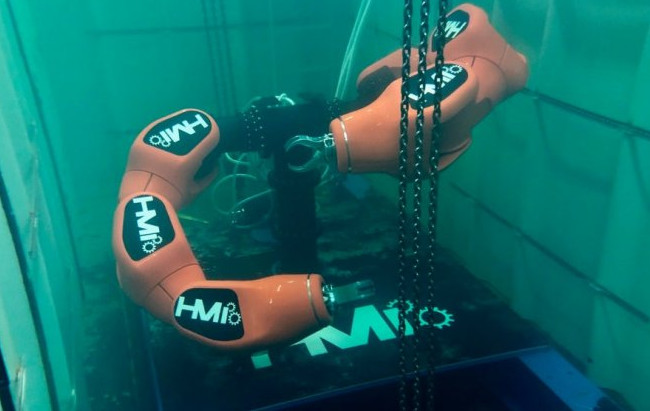
Aquanaut способен зависать на месте, перемещаться, проводить манипуляции на подводных объектах, к примеру, с подводными механизмами на морских нефтяных платформах при бурении скважин. В перспективе все эти операции будут выполняться автономно, но пока они проводятся под контролем удаленного оператора, находящегося на берегу.
Уже с конца следующего года Houston Mechatronics намерена начать продажу первых полностью действующих подводных аппаратов.
И будьте в курсе первыми!