Китайские ученые создали мягкого робота, который сумел погрузиться на дно Марианской впадины - «Роботы»

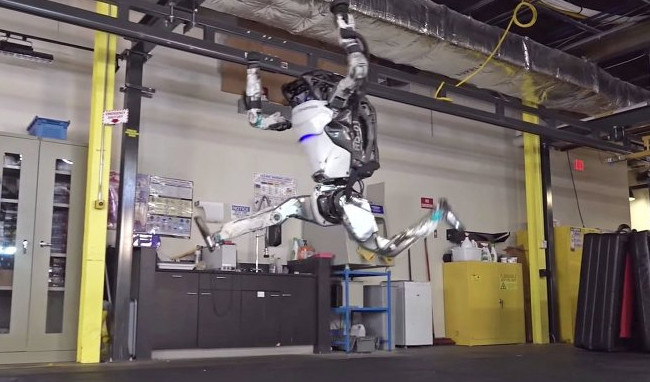
✔ Термин «Роботы» был введен в оборот Карелом Чапеком в своей пьесе «Россумские Универсальные Роботы», опубликованной в далеком 1920-м году. С тех пор о человекоподобных машинах написали все или почти все мировые фантасты, а три закона робототехники, предложенные писателем Айзеком Азимовым, считаются непреложной истиной, как будто бы разумные машины уже существуют. До искусственного интеллекта роботам еще далеко, но это не мешает им вовсю изобретаться и активно использоваться. |
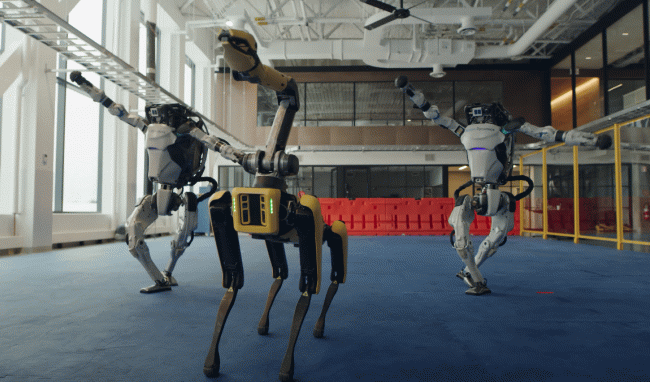
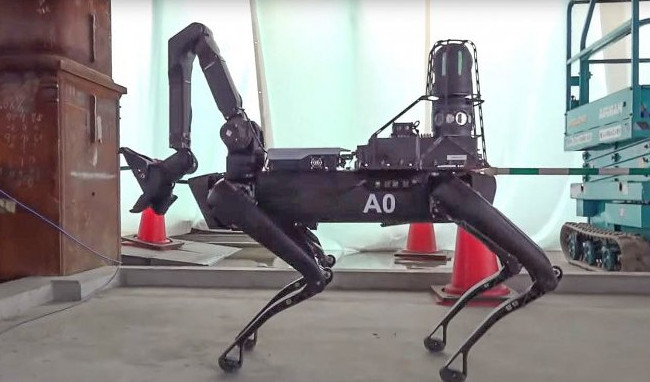
Робот в обычном представлении – это сложное устройство из металла и множества проводов, выполняющее некоторые функции, характерные, к примеру, для человека или животного. Примером тому – робот Spot компании Boston Dynamics.
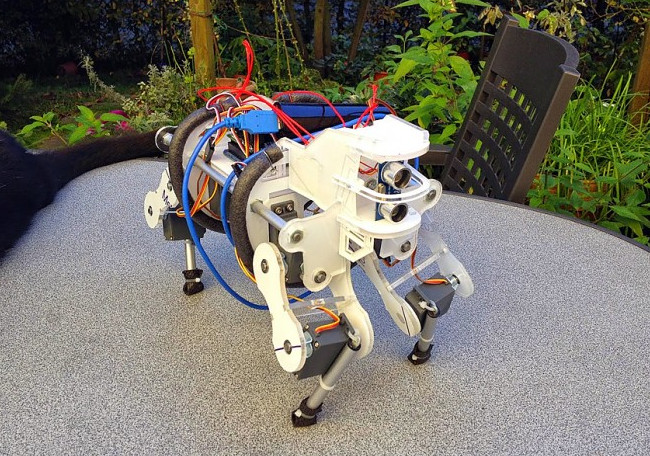
Однако в последнее время ученые доказали, что жесткая металлическая конструкция не является некой константой и создали целое семейство мягких роботов, которые оказались незаменимыми во множестве областей – например, при исследовании водных глубин. Прототипами для них стали морские обитатели, приспособившиеся к экстремальным глубоководным условиям – в частности, некоторые виды улиток и рыб, сочетающие в себе устойчивую к огромному давлению жесткость и гибкость. Группа китайских исследователей опубликовала доклад об итогах испытаний такого глубоководного робота-рыбы.
Мягкие роботы обладают гибкостью, однако этого мало. Как всяким роботам, им также необходимы источник питания, исполнительные механизмы, управляющая электроника и другое оборудование. Но если с прочностью литиевых батарей проблем не возникло, то с электроникой все оказалось гораздо сложнее: размещение процессоров, силовых преобразователей и систем управления на одной плате не годилось. Чтобы противостоять огромному давлению, их пришлось разместить в разных местах робота и соединить гибкими проводами.
Подвергся доработке и привод, выполняющий функции мышцы и плавника. Плавники изготовлены из гибкого полимера, расширяющегося и сжимающегося в зависимости от величины приложенного тока.
В итоге вся электроника благополучно уместилась в теле глубоководного робота, продолжением которого стал хвост такой же длины, два боковых «рабочих» плавника и тонкая гибкая мембрана, прикрепленная к плавнику, помогающая ему двигаться. Размеры робота – около 22 см в длину и 28 см между кончиками плавников. «Мышца» рыбы-робота размещена на стыке тела и плавника.
Первый этап испытаний проходил в резервуаре высокого давления и в озере на глубине 70 м, после чего робота погрузили на глубину 3 км в Южно-Китайском море. Итоговым испытанием для него стало погружение на дно Марианской впадины на глубину свыше 10 км, для чего робот был закреплен на специальной платформе: исследовали не решились выпускать его в свободное плавание, но это не помешало продемонстрировать ему свою функциональность.
Источник — Nature
И будьте в курсе первыми!