Cubimorph: прототип сенсорного устройства-трансформера с изменяемой формой - «Роботы»
Специалисты в области робототехники британского университета Бристоля во главе с Энн Роудаут разработали прототип сенсорного трансформера под названием Cubimorph, который будет представлен на этой неделе на форуме робототехники в Стокгольме. Устройство состоит из цепочки кубов с сенсорными
✔ Термин «Роботы» был введен в оборот Карелом Чапеком в своей пьесе «Россумские Универсальные Роботы», опубликованной в далеком 1920-м году. С тех пор о человекоподобных машинах написали все или почти все мировые фантасты, а три закона робототехники, предложенные писателем Айзеком Азимовым, считаются непреложной истиной, как будто бы разумные машины уже существуют. До искусственного интеллекта роботам еще далеко, но это не мешает им вовсю изобретаться и активно использоваться. |
Специалисты в области робототехники британского университета Бристоля во главе с Энн Роудаут разработали прототип сенсорного трансформера под названием Cubimorph, который будет представлен на этой неделе на форуме робототехники в Стокгольме.
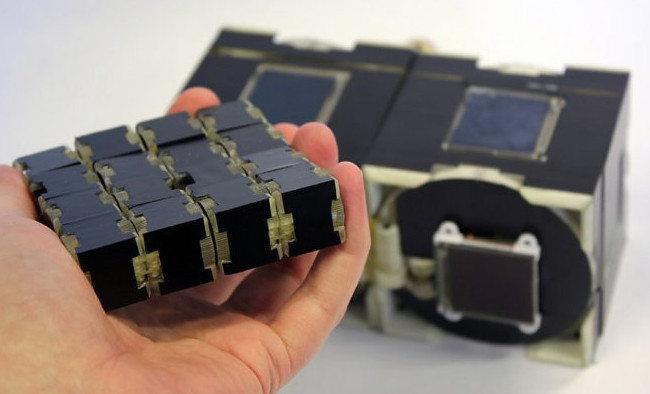
Устройство состоит из цепочки кубов с сенсорными экранами, которые могут соединяться друг с другом в различных конфигурациях, образуя трехмерные формы. На каждом кубике имеется 6 миниатюрных сенсорных поверхностей (по одной на каждую грань), установленных на поворотной платформе с монтажными петлями.
Именно они дают возможность вращаться кубикам в четырех направлениях и формировать различные 3D-формы. В качестве примера ученые превратили стандартный прямоугольный телефон в игровой контроллер.
Полное изображение формируется поперек мини-экранов, аналогично большим многоэкранным дисплеям, которые часто используются для уличной рекламы, сценического оформления или при проведении массовых мероприятий.
«Cubimorph – это первый шаг по созданию модульного интерактивного устройства, — говорит Энн Роудат, — многое еще предстоит сделать, прежде чем такие устройства станут достоянием пользователей. Но мы надеемся, что наша работа откроет дискуссию для дальнейшего развития взаимодействия между человеком, компьютером и роботами, которые, безусловно, могут быть полезны друг другу».
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Похожие статьи:

Представлены 36 проектов национальных стандартов в области ИИ - «Смартфоны»

Дневник Samsung Galaxy Z Fold2: почему два дисплея лучше, чем один - «Смартфоны»
Дневник Samsung Galaxy Note 20 Ultra: Bixby Routines — сценарии, приближающие будущее - «Смартфоны»

Шведское электротакси Bzzt пользуется «безумным успехом» - «Транспорт»

В Стокгольме построят жилой комплекс из деревянных высоток - «Технологии»

Украинский ученый разработал новые полимерные композиты для солнечных панелей - «Технологии»

Ученые работают над проектами самолетов с изменяемой формой крыла - «Технологии»

SolarGaps: жалюзи с солнечными батареями обеспечат квартиру бесплатной электроэнергией - «Новости Электроники»

Travel Cup: кружка определяющая качество воды от украинского стартапа H2OMetr - «Для дома»
Миниатюрные роботы на ионной тяге будут имитировать насекомых - «Технологии»
Чехол для телефона, – что выбрать для смартфона?

Пилот F-35 рассказал о серьезных проблемах в кабине истребителя - «Техника»

Интервью с А. Ю. Никифоровым, д.т.н., профессором, заместителем директора Центра экстремальной прикладной электроники НИЯУ МИФИ - «Смартфоны»

Беспилотные лодки спустят на воду в Голландии в 2017 году - «Транспорт»

Дневник Samsung Galaxy Note 20 Ultra: экран, который невозможно перехвалить - «Смартфоны»

Странные гаджеты: Джойстик для игры в покер - «Гаджеты»
Смотрите также
интересные публикации



