Инженеры создали роботизированную руку с тактильными датчиками - «Роботы»
✔ Термин «Роботы» был введен в оборот Карелом Чапеком в своей пьесе «Россумские Универсальные Роботы», опубликованной в далеком 1920-м году. С тех пор о человекоподобных машинах написали все или почти все мировые фантасты, а три закона робототехники, предложенные писателем Айзеком Азимовым, считаются непреложной истиной, как будто бы разумные машины уже существуют. До искусственного интеллекта роботам еще далеко, но это не мешает им вовсю изобретаться и активно использоваться. |
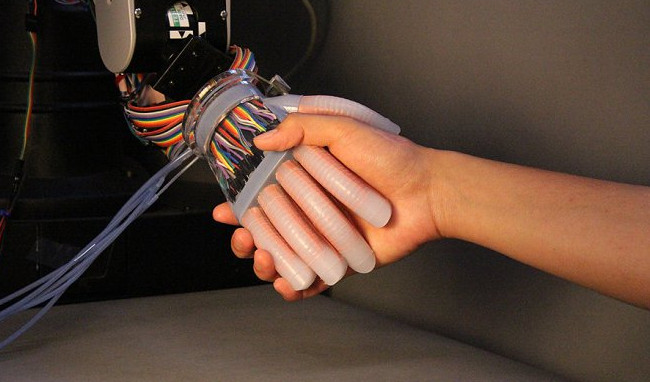
Большинство ныне действующих роботизированных конечностей, имитирующих человеческую руку, весьма громоздки и почти не обладают чувствительностью. Группа исследователей Корнельского университета во главе с доцентом кафедры механической и аэрокосмической техники Робертом Шепардом сумела наделить мягкого робота способностью ощущать предметы, подобно людям.
Для этого в мягкий протез руки были интегрированы эластичные оптические волноводы. Впервые их начали применять еще в начале 70-х годов, когда их использовали в устройствах для тактильного и акустического зондирования. Спустя почти 50 лет процесс их изготовления значительно усовершенствовался, в том числе, с помощью 3D-печати, в результате чего были разработаны эластомерные датчики, нашедшие применение в мягкой робототехнике.
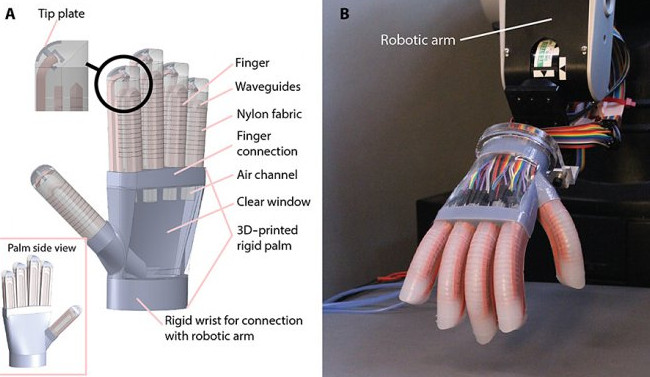
Ученые разработали процесс мягкой литографии для получения стержня, через который распространяется свет и наружной поверхности волновода, где также находятся светодиодный индикатор и фотодиод.
Чем больше деформируется протез руки – а это происходит в момент соприкосновения с каким-либо предметом — тем меньше света проходит через стержень. Уменьшение интенсивности света фиксируется фотодиодом, в результате чего протез «оценивает» окружающие его предметы. При отсутствии предмета свет не теряется и датчики попросту «молчат».
По мнению Роберта Шепарда, у будущих мягких роботов, оснащенных оптическими волноводами, значительно увеличатся их сенсорные возможности.
И будьте в курсе первыми!