Робот Marvel с магнитными лапами способен передвигаться по стенам и потолку - «Роботы»
✔ Термин «Роботы» был введен в оборот Карелом Чапеком в своей пьесе «Россумские Универсальные Роботы», опубликованной в далеком 1920-м году. С тех пор о человекоподобных машинах написали все или почти все мировые фантасты, а три закона робототехники, предложенные писателем Айзеком Азимовым, считаются непреложной истиной, как будто бы разумные машины уже существуют. До искусственного интеллекта роботам еще далеко, но это не мешает им вовсю изобретаться и активно использоваться. |
Семейство четвероногих роботов переживает бурную эволюцию, демонстрируя чудеса сноровки, но… пока только на горизонтальных поверхностях. Однако, глядя на них, понимаешь, что «гонки по вертикали» в их исполнении — всего лишь вопрос времени.
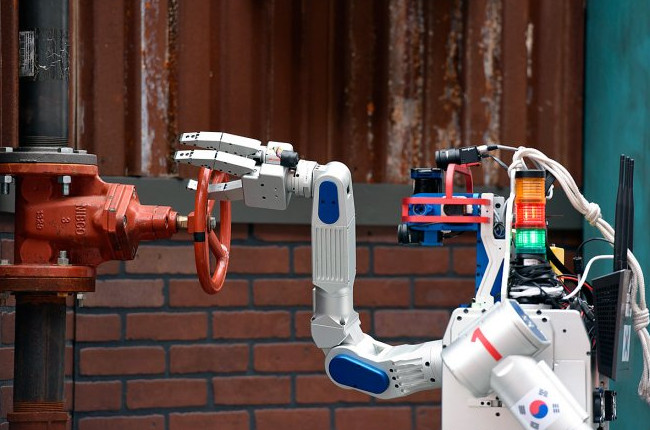
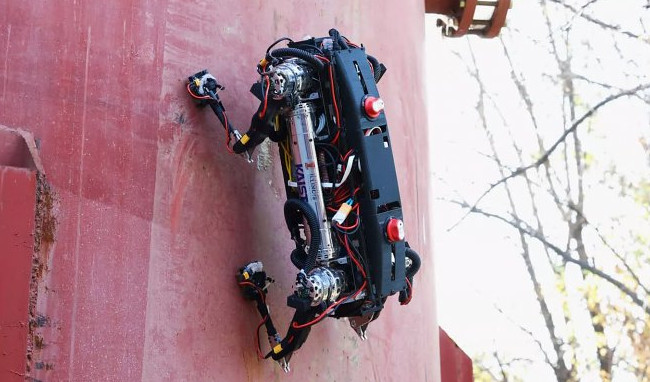
И вот первая ласточка: робототехники Корейского института передовых технологий (KAIST) совместно с коллегами из Университета Иллинойса (США) разработали четвероного робота Marvel, способного лазить по стенам и потолкам. Правда, при этом стоит уточнить — концы его лап оснащены магнитами, а стены и потолки должны быть металлическими. Нетрудно предположить, что места его будущего «обитания» — это крупные металлические конструкции, к примеру, нефтяные резервуары, мосты или водонапорные башни.
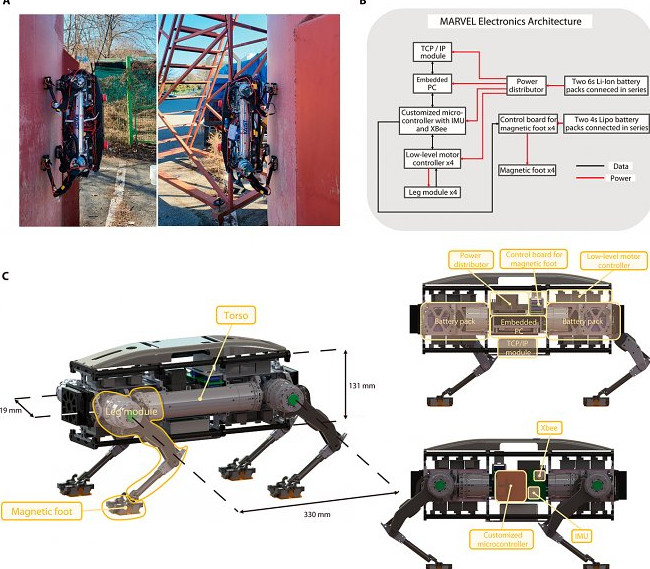
Для взаимодействия с металлическими поверхностями Marvel использует комбинацию магнитных эластомеров и электромагнитов (для намагничивания/размагничивания), что гарантирует необходимое чередование ног, когда одна пара «прилипает» к поверхности, а другая совершает шаг вперед. Перед тем, как начать взбираться вверх, будучи еще на «земле», Marvel совершает «маневр», напоминающий поведение кошки перед прыжком — он упирается передними лапами в поверхность, проверяя ее устойчивость.
В лаборатории робот-верхолаз уже научился совершать 10-см шаги, перешагивать через небольшие препятствия, постепенно переходя со стены на потолок — и, плюс ко всему, нести на себе полезный груз весом около 3 кг.
Еще более впечатляющими оказались результаты полевых испытаний: Marvel взобрался по изогнутой, заржавленной, покрытой пылью поверхности топливного резервуара со скоростью 0,35 м/сек, технично переставляя ноги и ловко обходя встречные препятствия.
Источник — Science Robotics
И будьте в курсе первыми!