Ученые создали самого быстрого мягкого робота в мире, взяв пример с гепарда - «Технологии»
✔ Технологии стоят у истоков любого изобретения. Благодаря им появляются новые устройства и материалы. В этом разделе вы найдете информацию о самых интересных технологиях современного хайтек мира. |
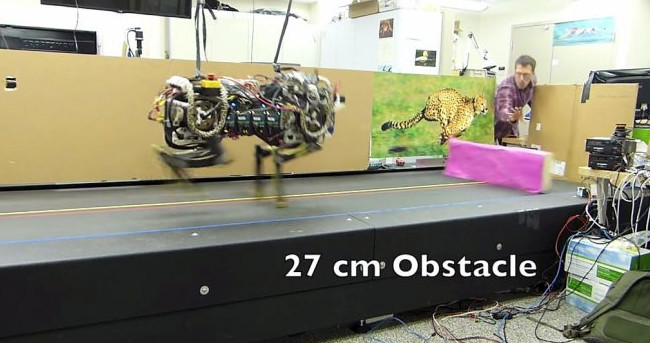
В Университете штата Северная Каролина разработали технологию движения для мягких роботов нового поколения. Она существенно расширяет скоростной диапазон такого рода машин, которые как раз скоростью никогда не отличались. Секрет новинки в скопированном у гепардов бистабильном положении тела во время движения.
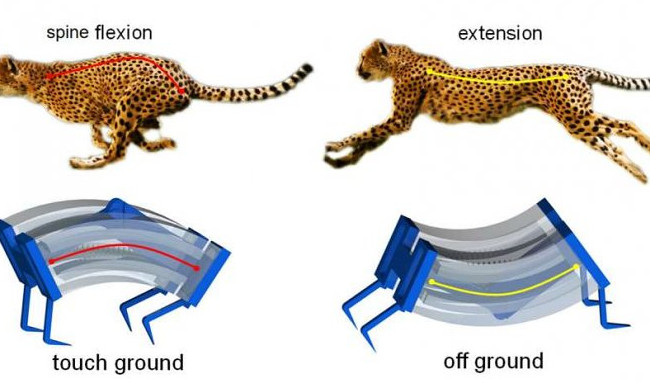
Самый быстрый бегающий зверь на планете, гепард, имеет много секретов достижения небывалых скоростей, один из которых – двойное положение позвоночника. Он выступает как гибкая балка, которая сначала сжимается и принимает форму дуги, а потом выпрямляется и даже изгибается в противоположную сторону. В первом состоянии конечности зверя касаются земли, но при переходе во второе происходит выброс энергии и гепард подрыгивает в воздух, отталкиваясь от земли и разрывая сцепление с нею.
Это важнейший момент – робот получает возможность гораздо меньше контактировать с поверхностью, ему не нужно постоянно преодолевать силу трения, как прочим мягким машинам, которые фактически ползают по земле. Робот-гепард скачет по ней, а в движение его приводит воздух, нагнетаемый в гибкие полости тела. Но, в отличие от старых конструкций, бистабильная система не имеет промежуточных состояний, поэтому пока другие мягкие роботы раздуваются и сдуваются, робот-гепард резво меняет форму тела и двигается вперед.
Ранее предел скорости для мягких роботов составлял 0,8 длины тела в секунду, а робот-гепард разгоняется до 2,7 длины тела в секунду. Он работает с частотой сокращений 3 Гц и за счет своей манеры передвижения гораздо легче преодолевает крутые склоны. Даже при движении под водой показатели новинки на 0,08 длины тела в секунду лучше всех конкурентов. Авторы разработки полагают, что смогут разогнать мягкого робота еще быстрее, потому что пока просто воспроизвели бистабильный механизм, а не работали целенаправленно над ходовой частью.
Источник — TechXplore
И будьте в курсе первыми!