В Тихом океане протестировали универсальную «хваталку» для морских гадов - «Роботы»

✔ Термин «Роботы» был введен в оборот Карелом Чапеком в своей пьесе «Россумские Универсальные Роботы», опубликованной в далеком 1920-м году. С тех пор о человекоподобных машинах написали все или почти все мировые фантасты, а три закона робототехники, предложенные писателем Айзеком Азимовым, считаются непреложной истиной, как будто бы разумные машины уже существуют. До искусственного интеллекта роботам еще далеко, но это не мешает им вовсю изобретаться и активно использоваться. |
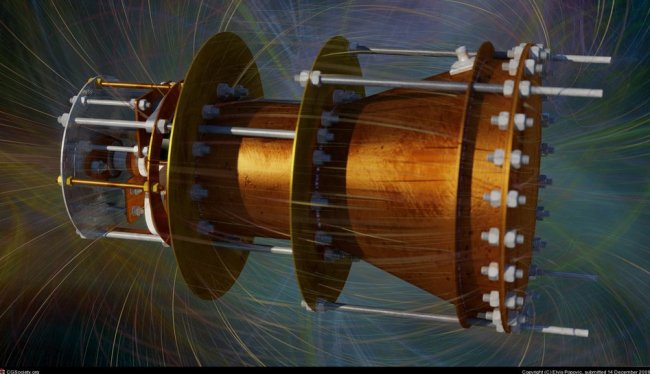
Чтобы работать на больших морских глубинах, вам нужно прочное и жесткое оборудование, которое выдержит высокое давление. В то же время для ловли подводных слизней, губок и прочих странных существ с мягким телом необходимо деликатное воздействие. Решить эту противоречивую задачу удалось при помощи 3D-принтера и универсальной «хваталки», сконструированной учеными из Гарварда.
У хваталки нет фиксированной формы, напротив, ее достоинство как раз в том, что конструкция собирается под конкретную задачу. По умолчанию это центральный шар-опора, к которому через пневматические подвески крепится некоторое количество «лап». Они полые и могут накачиваться жидкостью, меняя свою жесткость динамически, прямо во время охоты. Например, чтобы схватить слизня, нужен мягкий и даже нежный захват, а когда добыча оказывается внутри хваталки, та становится жесткой, как прутья клетки.
Использование 3D-принтера позволяет прямо на борту корабля, во время исследований, создавать новые инструменты. Например, заграждение в виде пластиковой бахромы, ресничек или прутиков, которые крепятся по бокам лап хваталки и создают барьер, чтобы мелкие существа не проскользнули между лап. В теории, даже если ученые столкнутся с совершенно новым и непонятным существом, они смогут подобрать оптимальную конструкцию захвата для него, не тратя время на возращение на базу. Прогресс в скорости исследований налицо!

Новая технология была крайне успешно опробована вблизи островов Феникс, в южной части Тихого океана. Ловля подводных обитателей велась на глубинах до 2224 м, где стальной манипулятор батискафа подводил хваталку к цели, а та по команде удаленного оператора аккуратно ловила ее в свой захват. Авторы разработки, окрыленные успехом, уверены – будущее за «мягкой» робототехникой, чей адаптивный потенциал поистине неисчерпаем.
И будьте в курсе первыми!