Мини-роботы со стайным поведением соединяются для преодоления препятствий, как муравьи - «Технологии»
✔ Технологии стоят у истоков любого изобретения. Благодаря им появляются новые устройства и материалы. В этом разделе вы найдете информацию о самых интересных технологиях современного хайтек мира. |
В своих работах ученые Университета Нотр-Дам, во многом, полагаются на устройства природных биологических систем. Например, для решения проблем преодоления препятствий небольшими роботами, будь то воздушная, подводная или наземная среда, за основу было решено взять коллективный образ действий муравьев, пчел и птиц. Выяснилось, что разработка небольших роботов со стайным поведением, способных перемещаться по сложной местности, может быть реализована на практике, но сопряжена с определенным набором проблем.
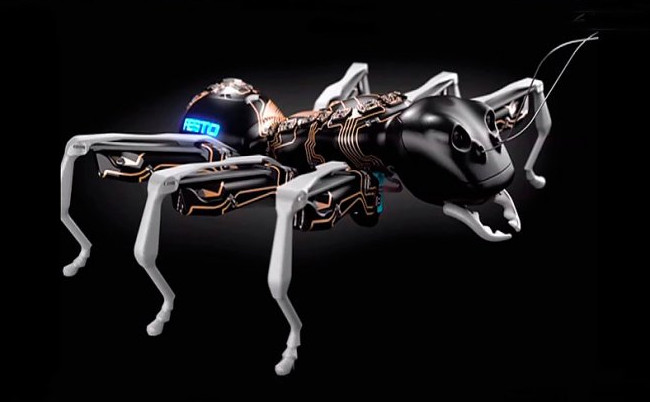
В исследовании, опубликованном в Science Robotics, ученые рассказывают о создании многоногих роботов, способных маневрировать в сложных условиях и коллективно выполнять сложные задачи, подражая своим собратьям из мира природы.
«Роботы на ножках, как у насекомых, могут перемещаться в сложных условиях, таких как пересеченная местность и ограниченное пространство, а использование конечностей обеспечивает эффективную поддержку тела, быструю маневренность и облегчает преодоление препятствий, - рассказывает автор исследования Ясемин Озкан-Айдын. – Тем не менее такие роботы сталкиваются с уникальными проблемами мобильности в земных условиях, что приводит к снижению двигательной активности».
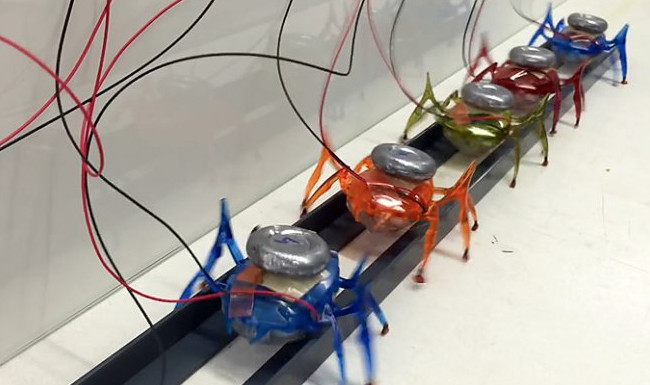
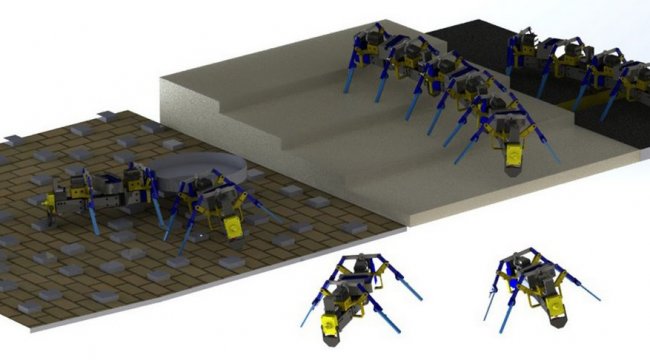
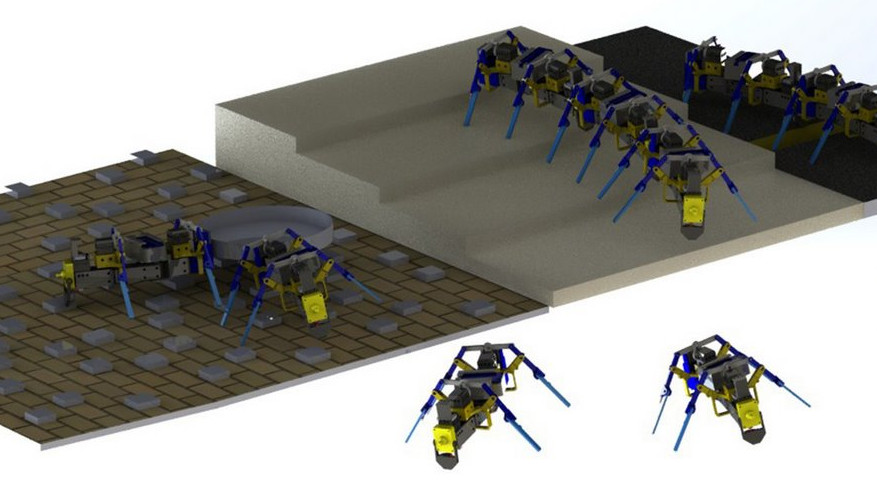
В ходе исследования была выдвинута гипотеза о том, что физическая связь между отдельными роботами может повысить мобильность коллективной системы. Отдельные роботы выполняли простые или нетрудоемкие задачи, такие как перемещение по гладкой поверхности или перенос легкого объекта, но если задача выходила за рамки возможностей отдельного устройства, роботы физически соединялись друг с другом, чтобы сформировать более крупную систему и вместе преодолеть проблему.
«Когда муравьи собирают или транспортируют предметы, если кто-то сталкивается с препятствием, группа работает сообща, чтобы преодолеть это препятствие. Например, если на пути есть разрыв, они выстраивают мост из своих тел, по которому другие муравьи могут перемещаться – и это послужило источником вдохновения для этого исследования, - говорит Озкан-Айдын. - С помощью робототехники мы можем лучше понять динамику и коллективное поведение этих биологических систем и изучить, как мы могли бы использовать такого рода технологии в будущем».
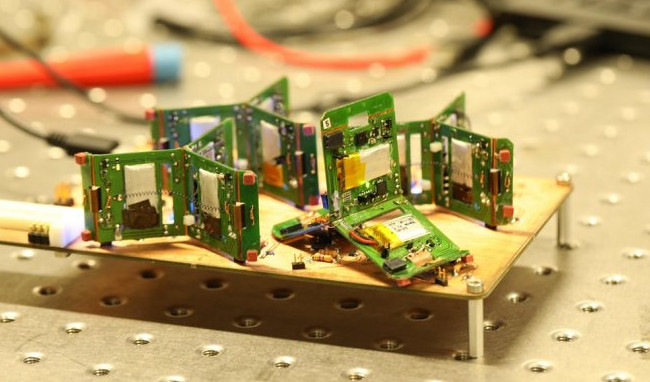
С помощью 3D-принтера ученые создали четвероногих роботов длиной от 15 до 20 сантиметров. Каждый был оснащен литий-полимерной батареей, микроконтроллером и тремя датчиками – освещенности и двумя магнитными спереди и сзади, которые позволяли роботам подключаться друг к другу. Четыре гибких ножки уменьшили потребность в дополнительных сенсорах и деталях и позволили устройствам пользоваться «механическим интеллектом», который помогал при взаимодействии на пересеченной или неровной поверхности.
«Вам не нужны дополнительные датчики для обнаружения препятствий, потому что гибкость ног помогает роботу проходить мимо них, - объясняет Озкан-Айдын. - Они могут преодолеть пробелы на пути, строя мост своими телами, перемещать предметы индивидуально или соединяйтесь, а также перемещать объекты совместно в разных типах сред, как это делают, например, муравьи».
Ученые говорят, что дизайн разработки еще предстоит улучшить. Полученные результаты исследования послужат основой для создания недорогих стайных роботов, которые могут адаптироваться к нестандартным ситуациям и коллективно выполнять реальные задачи, такие как поисково-спасательные операции, транспортировка объектов, исследование космоса и мониторинг окружающей среды.
Источник: news.nd.edu
И будьте в курсе первыми!